
نويسنده: دكتر امين گلستاني
مشاور و مدرس حوزه استراتژي فناوري اطلاعات
مقدمه
ديربازي است كه علوم مهندسي موفق شدهاند محصولي توليد نمايند كه پا را از شكل كالا و تجهيزاتي خود خارج و بهدنياي انسانها راه پيدا نمايد. روباتها ماشينهايي هستند كه برخي از قابليتهاي انسانها را به ارث بردهاند و همواره بهدنبال افزايش وجه تشابه خود با انسانها برآمدهاند. روباتها اولین بار در سال ۱۹۵۴ در صنعت به کارگرفته شدند که فقط در حد یک بازوی روبات یا Manipulator بودند و تنها سه درجه آزادی حركت داشتند. روباتهای صنعتی امروزی اکثراً همان بازوی روباتیک هستند ولی با درجه آزادی بالاتر و البته بسيار پیشرفتهتر نسبت به گذشته کار میکنند. تاريخ گواه اين موضوع است كه انسان هر آنچه را در ذهن خود پرورانده در حقيقت نيز به آن رسيده است. آدمآهني و روباتها نيز همواره در فكر انسان وجود داشته و امروزه نقش مهمي در صنايع و سازمانها ايفا مينمايند.
روباتهاي نسل اول، نسبت به محيط پيرامون خود واكنشي نشان نميدادند، آنها بهدقت به وظايف خود عمل ميكردند اما انعطافي در برابر شرايط محيطي نداشتند، لذا بهسرعت روباتهاي نسل دوم مجهز به سنسورهايي شدند كه بتوانند برخي عوامل محيطي را دريافت كنند و وظايف خود را با توجه به وروديهاي جديد انجام دهند و اين موضوع نيز ديري نپاييد كه با پيشرفتهاي علوم مهندسي فناوري اطلاعات و ساير رشتههاي مرتبط مانند الكترونيك و مكانيك و البته دستيابي به حوزههاي هوش مصنوعي، روباتهاي نسل سوم با استفاده از ميكروكنترلرها و امكان انطباق بيشتر با محيط و انجام فعاليتهاي هوشمند براي كاربردهاي ويژهاي پديدار شدند. اين روباتها با شكل و اندازههاي مختلف و دستهبنديهاي متفاوت، وارد زندگي انسانها شدهاند و بخش زيادي از فعاليتهاي وقتگير، سخت و طاقتفرسا، دقيق و غيرممكن براي انسان را بهعهده گرفتهاند و درواقع روباتيك بهعنوان بخش مهمي در صنايع و سازمانها براي خود جايگاه ويژهاي پيدا كرد. دراين مقاله ضمن معرفي دستهبندي روباتها و تحليل عمكلرد آنها به آيندهپژوهي نيز پرداختهشده است تا درك بهتري از تقسيم وظايف انسان و روباتها در نسلهاي آينده بهدست آيد و براين اساس بتوان فرصت و تهديدات ناشي از حضور روباتها در فرايندهاي سازماني را به حيطه تحقيق كشاند. در اين مقاله بهصورت مطالعات مروري و ترويجي سعي شده تا به استنتاج و درك علمي نسبت به نقش ماشينهاي متفكر و هوشمند در زندگي بشر، همچنين مديريت كسب و كارها ارائه گردد، لذا بدين منظور با استفاده از بررسي روند توسعه و پيشرفت علم روباتيك و مكاترونيك به نرخ دخالت روباتها در زندگي و روابط اجتماعي پرداخته شده است تا با ارائه تصويري از آينده روباتها بتوان فرصتها و تهديدات اين رشته جديد علمي را مشخصتر نمود. دراين راستا بصورت مطالعات كتابخانهاي و همچنين جستجوهاي موردي، نرخ پيشرفت روباتها و علوم وابسته، مورد بررسي و كنكاش قرار گرفته است.
دستهبندي روباتها
بنا به تنوع و گوناگوني روباتها و بهمنظور تقسيمبندي دقيق بين آنها لازم است تا سه مبنا در نظر گرفته شود و روباتها بر اساس اين سه مبنا دستهبندي شوند:
الف- مبناي اندازه، ب- مبناي حركت، ج- مبناي وظايف
بنابراين با توجه به پيكربنديهاي پيچيده و متفاوت موجود، ميبايست كليه روباتها از نظر سايز و اندازه، قابليت، نوع حركت و همچنين وظايف و توانايي در ردههاي خود قرار گيرند تا مقايسهپذيري ممكن گردد.
الف- مبناي اندازه
در اين محور سه نوع روبات، محل تعريف دارد:
- روباتهاي خيلي كوچك درحد ميكرو يا نانو روباتها
- روباتهاي متوسط
- روباتهاي خيلي بزرگ يا ابر روباتها
ب- مبناي حركت
در اين محور، روباتها به سه گروه عمدة ساكن، متحرك و تبديلشونده تقسيم ميشوند. روباتهاي ساكن، روباتهايي هستند كه قابليت حركت ندارند و بصورت ثابت در محلي مستقر و تثبيت ميشوند تا با دريافت منابع تغدية انرژي و اطلاعاتي بتوانند ارائه خدمت كنند، اما محل تامين انرژي و دريافت و پردازش اطلاعات در روباتهاي متحرك بصورت كاملا مجزا ساخته ميشود و تمامي اقدامات براساس نحوه حركت روبات طراحي ميگردد، براي اين منظور روباتهاي دونده، راهرونده، خزنده، شناگر، پروازي، غلتنده، منجمله مهمترين انواع موجود در اين دسته بهحساب خواهند آمد. اما روباتهاي تبديلشونده، داراي تركيبي از چند وضعيت را ميتوانند بخود بگيرند لذا براي عبور از برخي مسيرها يا براي جابجايي بعضي اجسام، ميتوانند شكل ظاهري خود را به نسبت كاركرد و محيط تغيير دهند.
ج- مبناي وظايف
تاكنون تقسيمبنديهاي انجام شده، براساس ظاهر و شكل طراحي روباتها انجام شد، لذا لازم است تا روباتها براساس وظايفي نيز كه بر عهده دارند و نوع خدماتشان، در دسته مناسب قرار گيرند. بدين منظور سه رده اصلي روباتهاي نظامي، روباتهاي كنترلي و تحليلگر و همچنين روباتهاي خدمترسان در نظر گرفته شده است. مطابق اين رويه، كليه روباتهايي كه اهداف تهاجمي يا تدافعي را پيگيري ميكنند بهعنوان روبات نظامي ميشناسيم، معمولا اين نوع روباتها بسيار پيچيده، خاص و گران بوده و ساختاري محرمانه دارند اما آنچه حائز اهميت است اين موضوع ميباشد كه اغلب روباتهاي تحليلگر و خدمترسان، يا زماني در زمرة روباتهاي نظامي بودهاند و يا اينكه براي طراحي و ساختِ آنها از روباتهاي نظامي الگو يا الهام گرفته شده است، زيرا محصولات نظامي معمولا بهعنوان پيشروِ توليدات ساير صنايع محسوب ميشوند.
روبات كنترلي و تحليلگر، ماشينهايي هوشمند هستند كه فرايندهاي پردازشي در آنها بيشتر از فعاليتهاي فيزيكي و حركتي تقويت شده است و حتي ممكن است به شكلهاي متعارف روباتها كه بيشتر شبيه انسان طراحي ميشوند نيز نباشند و در قالب يك شكل نامتعارف ديده شوند اما وظايف كنترل يك هدف يا فرايند، تحليل و نتيجهگيريهاي دقيق و احتمالا بلادرنگ[۱] از مهمترين شاخصهاي تفكيك آنها ميباشد. گاهي تعداد و افزونگي فرايندها آنچنان زياد ميگردد كه هر تعداد نيروي انساني كه براي كنترل و تحليل گمارده شوند، باز هم امكان بروز خطا يا نواقص در بررسيهاي عملياتي، محتمل خواهد بود. در اين مواقع، روباتها ميتوانند بهترين جايگزين باشند.
گاهي به روباتهاي خدمترسان، روباتهاي خدماتي نيز گفته ميشود اما به جهت كاربردهاي حساس اين نوع خدمت، واژة خدمترسان، مفهومي مناسبتر از خدمات عمومي را القاء ميكند، بنابراين براي استفاده، رايجتر ترجيح داده شده است.
روباتهاي خدمترسان بهطور كلي به چهار دسته تقسيم ميشوند: ۱- روباتهاي كارگر، ۲- روباتهاي آموزشي، ۳- روباتهاي پزشكي، ۴- روباتهاي سرگرم كننده،
عمده روباتهايي كه به انجام كارهاي سخت و طاقتفرسا در محيطهاي صنعتي ميپردازند، در دسته روباتهاي كارگر قرار ميگيرند اين روباتها ميتوانند در محيطهايي كاركنند كه امكان كار براي انسان مهيا نيست و يا احتمال بيماري و مشكل براي او باشد مانند كورهها، سردخانهها، آزمايشگاههاي هستهاي، محيطهاي ميكروبي، فضا، زيرآب، محيطهايي با گازهاي خطرناك يا فاقد اكسيژن، مناطق جنگي، محيطهاي پرفشار يا كمفشار و ساير فضايي كه انسان در آن دوام نميآورد. بعضي از اين روباتها در قالب بازوهاي حملكننده، كِشنده، فشاردهنده، جابجاكننده و غيره نيز ديده ميشوند. حال اينكه ممكن است محيط نيز براي انسان مناسب باشد اما تعداد، دقت و سرعت انجام فعاليتها بهقدري بالا باشد كه از توان و ظرفيت انساني خارج شود لذا بازهم روباتهاي كارگر به مدد ميآيند. مثلا براي چسبانيدن ميليونها تراشة ريز بروي بوردهاي نازك در تيراژهاي بالا قطعا دستان يك انسان نميتواند دقت و سرعت روبات را داشته باشد.
روبات آموزشي، ماشيني تعاملاتي با مخاطب و محيط است كه با استفاده از ابزارهاي كمك آموزشي مدرن، متناسب با ضريب هوش مخاطب و سطح يادگيري وي اقدام به انجام فعاليتهاي آموزش محور مينمايد. اين موضوع در آموزش موارد حساس كه نياز نيست احساسات و حالات طبيعي انسان دخيل باشد، نقش موثري دارد مانند مربي پرواز يك جتِ جنگنده. يا راهبر تيمِ اعزامي به فضا.
روباتهاي پزشكي نيز نوعي از روباتهاي خدمترسان هستند اما بدليل وجود تنوع و دستهبنديهاي متعدد در زيرشاخههاي پزشكي، ترجيح داده شده تا آنها بطور خاص در يك دسته مجزا قرار گيرند. اين نوع روباتها ميتوانند به تشخيص بيماري، تجويز دارو و انجام حركات فيزيولوژيك حساس مانند جراحي بپردازند و قطعا انجام اين فرايندها براي يك ماشين بدون دخيل نمودن احساسات شخصي و انساني و با حداكثر دقت و سرعت ميتواند ابزار مهمي در علم پزشكي بهشمار آيد.
روباتهاي سرگرم كننده، وظايف متنوعي را اعم از ميزباني، ارائه خدمات پذيرايي، بازيهاي دوطرفه، پرستاري و غيره بهعهده دارند درحقيقت كليه خدمات سرگرمي و نگهداري، توسط اين گروه از روباتها ارائه ميشود.
آينده روباتها
نكته جالبي كه در توسعه علوم روباتيك وجود دارد، موضوعيت چندرشتهاي بودن آن است، چراكه با بدست آمدن هر پيشرفتي در يكي از رشتههاي زير مجموعه، علوم روباتيك نيز يك قدم جلوتر ميرود. مثلا با كشف آلياژهاي مختلف در علوم شيمي و مكانيك، بدنه و بازوهاي روباتها و حتي تراشهها تغيير مييابد، با توسعه علوم فناوري اطلاعات، شاهد تغييرات بنيادي درنحوه پاسخدهي هوشمندانه روبات و دامنه عملكرد آنها خواهيم بود. لذا يكي از عوامل مستمر كه چرخه پيشرفت علوم روباتيك را همواره به جلو سوق ميدهد، موفقيتهاي ساير رشتههاي علمي است. درايناثنا با توجه به نرخ پيبشرفت علوم، تا حدودي ميتوان آيندة روباتها را به تصوير كشيد. مكاترونيك نيز شاخهاي از مهندسي محسوب ميشود كه هدف اصلي آن، ساختن ماشينها و سيستمهاي هوشمند است. اين شاخه نخستين بار در سال ۱۹۶۹ توسط يک شركت ژاپنی به نام ياسكاوا بهصورت يك واژه تركيبي از مكا (برای مكانيك) و ترونيك (براي الكترونيك) معرفي شد. عناصر اصلى يك سيستم مكاترونيكى عبارتند از فرآيند مكانيكى يا الكترومكانيكى، حسگرها، محركهها، ريزپردازندهها و نرمافزار كنترلكننده سيستم.
معمولا در طراحىهاي كلاسيك، اجزاى مختلف يك سيستم به طور جداگانه طراحى شده و سپس تجميع صورت مىگيرد ولى در روباتيك و مكاترونيك، اجزاى مكانيكى و الكتريكى به همراه استراتژى كنترلى از ابتدا به صورت يك سيستم يكپارچه در نظر گرفته مىشوند و اين به معناى مهندسى همزمان در طراحى است. نكته مهم در اينجا، تفاوت مهندسى الكترومكانيك با مكاترونيك است. در مكاترونيك، حاكميت همزمان بودن طراحى، يكپارچهسازى و حتى بهينهسازى، موضوع اصلي است اما در مهندسى الكترومكانيك، لزوماً اين معنا حاكم نخواهد بود. بههمين صورت بين دو علم روباتيك و مكاترونيك نيز تفاوتهايي وجود دارد، بدين ترتيب كه ورودي سیستمهای مکاترونیکی از قبل فراهم شده است در حالیکه سیستمهای روباتیکی باید خودشان ورودیها را از محیط دریافت و تامين نمایند، درواقع سیستمهای روباتیک دارای حسگرهایی هستند که از محیط، اطلاعات را کسب ميکنند، ولی سیستمهای مکاترونیکی نسبت به محیط بیتفاوت هستند. همچنين سیستمهای مکاترونیکی خودکار هستند در حالیکه سیستمهای روباتیکی خودمختار هستند و درنهايت سیستمهای روباتیکی نیازی به حضور مستمر انسانها براي تفکر و محاسبات ندارند، در حالی سیستمهای مکاترونیکی، نیازمند تفکر انسانها از قبل یا حتي همزمان با فعاليت میباشند.
روباتهاي نسلِ حاضر، توانايي انطباق بيشتر با محيط و استفادة سطح بالاتري از هوش مصنوعي را دارا هستند، بنابراين در نسل چهارم روباتها، برقراري روابط اجتماعي با انسانها و كسب جايگاه همدمي مطمئن براي انسان خارج از ذهن نيست، حتي ميتوان مطابق تصوير زير، نسل پنجم روباتها را با تلفيق هوشمندي و خلاقيت متصور بود لذا در اين نسل، روباتها بيشتر به انسانها شبيه شده و حتي قادر به ايجاد نوآوري و فعاليتهاي خلاقانه خواهند بود.
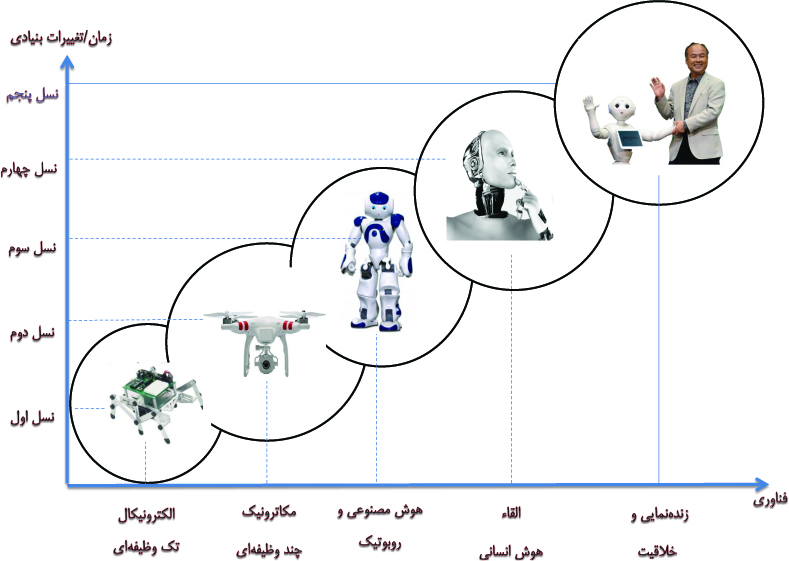
تصوير شماره يك: رشد فناوري و پيدايش روباتها
تصوير شماره يك، نشان از روند ورود روباتها به زندگي انسان دارد. همانطور كه ملاحظه ميفرمائيد، هيچيك از ابعاد پيشرفت روباتها بصورت مستقل از مرحله قبل شكل نگرفته است لذا بين هر مرحله، همپوشاني ديده ميشود كه اين همپوشاني در واحد زمان، به سير تكاملي معروف است.
با پيشرفتهاي علوم، شاهد كوچكتر شدن روباتها تا رسيدن به ميكرو روباتها بوديم و اكنون با پيشرفتهاي فيزيك نانو، نانو روبات در سطحي درخشان، خودنمايي ميكند. در عصر حاضر اين توسعه با علوم پزشكي همراه شده است و در دانشگاه هاروارد مطالعات جهت توليد نانو روباتهايي كه از DNA ساخته شوند جهت ترميم و از بين بردن سلولهاي سرطاني از طريق آنتي ژن ضد سرطاني حامل روبات آغاز شده است و محققين اين دانشگاه خبر از كاربردي شدن اين موضوع تا كمتر از بيست سال آينده ميدهند و با استفاده از دانش نانوتكنولوژي، دانشمندان در حال طراحي نانوروباتهاي زيستي هستند تا در بدن انسان قرار گيرند و نقش محافظ و درمانگر را ايفا كنند، اين ريزماشينهاي هوشمند قادرند، چندين نسخه از خودشان تكثير و جايگزين بافتهاي فرسوده يا آسيبديده نمايند.
ضمنا به گفتهfuturist.com تا كمتر از سي سال آينده، سطح هوش مصنوعي ماشين با انسان برابري خواهد نمود و اين امكان ميتواند دروازههاي جديدتري را بروي پيشرفت علوم روباتيك و ساخت روباتهاي ابرهوشمند باز نمايد. لذا در نسل چهارم روباتها، روابط اجتماعي و درك متقابل بين انسان و روبات، پيشبيني شده است. دانشمندان و محققان دانشگاه نیوکاسل بریتانیا با کمک انجمن ملی علم ایالات متحده، گامي فراتر گذاردهاند و با الهام گرفتن از مكانيزم بدن مارماهي، بهدنبال ساخت روباتي با يك سیستم عصبی الکترونیکی بسیار ساده و در عین حال کوچک ميباشند تا بتواند بدون این که در کارکردهای کلی بدن مانند متابولیسم و یا تنفس، خللی ایجاد کند، به كاوش در بين ساير سلولها بپردازد و بیماریها را قبل از وقوع، پیشبینی کند. این شايد اولین روباتی باشد که قرار است بهصورت بیولوژیکی تولید شود تا نیاز به شارژ الکتریسیته نداشته باشد. البته موانع پیشِ روی ساخت این روبات بسیار است. برای مثال گلبولهای سفید خون، هر ماده خارجی را در بدن مورد حمله قرار میدهند و شايد لازم شود که محققین نوعی واکسن هشدار دهنده را نیز در کنار این روبات طراحی کنند تا با اعلام هشدار به این گلبولها، روبات را به صورت یک عامل داخلی معرفی کند. نانو روباتها آنقدر در حال توسعه هستند كه در آينده قادر خواهند بود وارد بافت مغز شوند و بخشهای آسیبدیده را ترمیم و بازسازی کنند و حتي حافظة انسان را نیز کپی کنند.
آينده روباتها فقط در علوم پزشكي يا فضانوردي خلاصه نخواهد شد، انسان براي روباتهاي سرگرمكننده نيز برنامههايي دارد و تلاش ميكند تا سال ۲۰۵۰ تيمي از روباتهاي فوتباليست بسازد، ظاهرا اين روباتها به ابزارهاي هوشمندانهاي مجهز خواهند شد كه از طريق نوآوري در تاكتيك و تكنيك، حتي قادر به شكست تيم انساني فوتباليستها نيز باشند. لذا با اين نرخ پيشرفت و تفكر، اينکه در هر خانهای یک روبات انساننما و همهکاره وجود داشته باشد، آيندة بعيد و دور از دسترسي بهنظر نميرسد.
[۱] Real-Time
ادامه دارد….



